The language of Science does not use words. There is no ‘time’, ‘distance’ or ‘speed’ in science. Science uses diagrams and a single unit, ‘metre’, which cancels out of equations to leave only diagrams and numbers. Trigonometry is the science of diagrams and numbers, so trigonometry is the language of science. There are no theories in science. If a diagram explains observations, that is the end of the matter. A diagram which fails to explain observations is discarded and another diagram sought. The measurements of ‘speed’ cameras along roads provide a simple example of the wordless language of science.
The language of science obeys George Berkeley’s Likeness Principle of 1710. Traditional science divides an imagined world of words into the word-based categories of mass, length and time (MLT) before applying a weaker ‘MLT’ likeness rule to each category. The failure to satisfy the Likeness Principle invalidates traditional science. To satisfy the Likeness Principle it is necessary to abandon concepts like time, distance and speed for self-explanatory diagrams.
The theories of traditional science
Instead of finding out what is measurable and building science from that, scientists imagine three different concepts described by three different words, space, time and speed, and claim, without any supporting evidence, that all three can be measured. To justify that claim they exempt space and time from the logic of the Likeness Principle by inventing a weaker ‘MLT’ (mass, length and time) rule. That unjustified step invalidates theories.
The Likeness Principle
The likeness principle asserts that all terms in a logical statement must be like each other.
A number is not like anything else except another number, so if one term in a scientific statement or equation, is a number, all terms in that statement or equation must be numbers. A distance is only like another distance so if one term is a distance, all terms must be distances. A time is only like another time, so if one term is a time, all terms must be times. The statement: ‘A speed is a distance divided by a time’, is illogical because time and distance are not like each other.
If all terms in a statement are alike it doesn’t matter what they are called because the name cancels out in equations to leave only numbers. George Berkeley used the name ‘regularity’ when he wrote that ‘The sort of explanation proper to science, then, is not causal explanation, but reduction to regularity’. Reduction to a single name is equivalent to a reduction to numbers and diagrams.
Clocks and rulers
When two synchronised clocks are separated by 300 metres their readings are seen by observers at the clocks to differ by one microsecond. One microsecond is therefore an alternative way of describing 300 metres. Comparing the readings of a pair of clocks is a way of measuring lengths of the sides of triangles.
In 1676 the diameter of the Earth’s orbit round the sun was measured by comparing the readings of a terrestrial clock with the readings of an astronomical clock on Jupiter over a period of several years. The distance between Earth and Jupiter varies (roughly) by the diameter of Earth’s orbit every year. That distance was found to be either 186 million miles or 1000 seconds, depending on which of the units, ‘mile’ or ‘second’, is used. When a single unit is chosen, units cancel out of equations, leaving only numbers, in the form of trigonometric functions.

‘Speed’ camera measurements
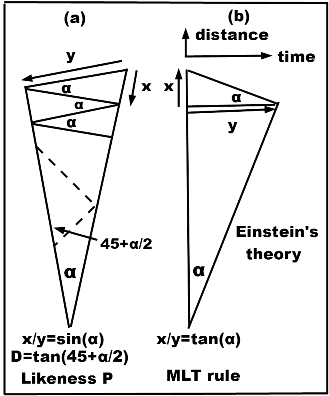
A speed camera takes two photographs of a car travelling over a ruler painted on the road. The images of the car on the ruler define in metres the shortest side, x, of a right-angled triangle. The angle a is the smallest angle and is opposite to the shortest side. Two successive readings of the camera’s clock measure the interval, y metres, between the two photographs. That provides another side of the triangle. Then x/y is either sin(a) or tan(a). Because a is the smallest angle of the triangle and x the shortest side, the maximum value of x/y is one. That identifies x/y as sin(a), not tan(a).
Equations (1-4) are obtained from diagram (a) by trigonometry.
D=(1+S)/C (1)
D-1=(1-S)/C (2)
D2=(1+S)/(1-S) (3)
S=(D2-1)/(D2+1) (4)
S is a number which describes the relative motion of a pair of objects, a car and a camera. If S1 and S2 describe two such pairs, it is possible to obtain a third number S3 which describes the relative motion of the two cars. The value of S3 is given by (6) or (8) depending on whether the cars are travelling in the same direction or opposite directions along the road.
D32=D12/D22 (5)
S3=(S1-S2)/(1-S1S2) (6)
D32=D12D22 (7)
S3=(S1+S2)/(1+S1S2) (8)
D, S=sin(α) and C=cos(α) are numbers. For example, if D=3/2, S=5/13; if D=2, S=3/5; if D=3, S=4/5. These three pairs of numbers are used in fig 3 to illustrate how S, D and SD depend on the angle, α. The number, SD, approaches the number, S, at small angles and the number, D, at large angles.

Fig 3: The dependence of the measured numbers S, D and SD on the angle, α. SD converges on S at small angles, α, and on D at large α.
S=sin(α)=x/y is a number measured by a speed camera from two photographs of a car travelling along a ruler painted on the road. The separation of the two images, x, and the interval between the photographs, y, are both measured in metres. S1 and S2 are the results for two cars travelling in opposite directions. Fig 3 shows how to obtain S3, the number describing the relative motion of the two cars.
From S1 and S2 one obtains D1 and D2 by using (4). Then by multiplying D1 and D2 together one obtains D3. Finally, one obtains S3 from D3 by using (4), or, less conveniently, directly from S1 and S2 by using (8).
The best number to represent the ‘speed’ concept
Fig 3 offers three numbers, S, D and SD which might be identified with the traditional concept of speed. S suffers from being limited to numbers below 1. D suffers from being limited to numbers greater than 1. SD forms a bridge between them and is therefore the most suitable choice. For the small speeds of vehicles on roads the difference between S and SD is insignificant.
There is no sign in fig 2(a) and fig 3 of Einstein’s ‘constant speed of light’ or of his ‘light cone’. There are similarly no signs of time dilation and length contraction, or of Minkowski’s 4-vectors. These are creations of theories using concepts like time, distance and reference frames. They are not measurable because they do not exist outside human minds. Fig 2(a) and fig 3 are confined to numbers that can be measured and to equations that satisfy the Likeness Principle. They have objective existence.
Thank you for joining me.
Stan Clough
Professor emeritus of Physics, University of Nottingham, UK
